Прошлое и будущее робототехники
Введение
Часть 1. История робототехники
Популярная история роботов
Наши железные друзья 1. Тело
Наши железные друзья 2. Мозги
Часть 2. Люди и роботы
Вопросы неравенства
Пределы личной ответственности
Cоздатель и его создание
Что значат человеческие ошибки
Роботы как новая раса
Эпоха одухотворенных машин
Есть ли у роботов душа?
Кто такие e-существа?
Заключение
Литература
Введение
Вне сомнений, робототехника представляет собой естественное логическое продолжение техники как явления. Стремление автоматизировать любой труд постепенно вытесняет человека из многих сфер его деятельности, предоставляя взамен все новые возможности для приложения усилий: просмотр кинофильмов, подводные погружения, компьютерные игры и т.д. Часть всеобщего труда, затрачиваемая человечеством на производство средств производства, а не конечного продукта потребления, постепенно увеличивается от 0%, очевидно стремясь к 100%. Уже сейчас усилия большинства наилучших современных роботов направлены на производство других машин: станков, автомобилей, компьютеров и т.д.
Будучи одной из самых интригующих вечных тем (как Бог, вселенная, время и свобода воли), робототехника с самых ранних времен привлекает к себе интерес философов и писателей. Прогресс в философском осмыслении вопросов создания искусственных думающих машин на текущий момент далеко опережает практические результаты в этой области[1].
Необходимо сразу уточнить используемые термины. Вполне естественной кажется следующая классификация от простого к сложному: механизм, машина, робот, андроид.
Механизм – это непосредственное использование материалов для обеспечения некоторой механической функции; при этом все основано на взаимном сцеплении и сопротивлении тел.
Машина – это совокупность механизмов, заменяющих человека или животное в определенной области; преобразует энергию из одного вида в другие (в основном, в тепловую энергию). На самом деле, термин «машина», как отмечает Марвин Минский[8], имеет отношение не столько к совокупностям, сколько к тому, для чего это совокупность используется, – а используется она главным образом для автоматизации труда.
Робот – понятие неопределенное, к которому можно отнести любой вид машины; термин обычно используется для художественного эффекта или означает, что в машине используются манипуляторные механизмы, позволяющие машине манипулировать предметами. Важным свойством роботов является определенная степень автономности.
Наконец, Андроид[2] - это робот-гуманоид, т.е. антропоморфная, имитирующая человека машина, стремящаяся заменить человека в любой его деятельности. Андроид обязан выглядеть и вести себя как человек.
Вопрос об интеллектуальности машин стоит особняком от роботов и андроидов, поскольку, очевидно, совсем не обязательно выглядеть и двигаться как человек для того, чтобы сравниться с ним по интеллекту.
Отдельную нишу занимают кибернетические организмы – живые системы, содержащие в себе искусственные компоненты для расширения своих возможностей. Вот выдержка из Википедии[3]:
Идея киборга появляется в научной фантастике незадолго до Второй Мировой войны. Термин введен Манфредом Е Клайнсом и Натаном С Клином в 1960, в связи с их концепцией расширения возможностей человека для выживания вне земли. Эта концепция являлась результатом размышлений на тему необходимости более близких, интимных отношений между человеком и машиной, по мере того как космические исследования становятся реальностью. Дизайнер медицинского оборудования и устройств электронной обработки информации, Клайнс являлся ведущим учёным лаборатории Динамического Моделирования госпиталя Роклэнд в Нью-Йорке.
Очевидно, не существует никакой реальной возможности затормозить развитие современной техники на пути к построению киборгов, андроидов и, в конечном итоге, искусственного разума. На фоне этого все чаще обсуждается возможность потери человечеством контроля над собственными созданиями, однако ситуацией руководит неконтролируемый процесс, описанный в демонической фразе
Я управляю тобой, поскольку ты должен дочитать меня до конца...[4]
Текст далее разбит на две части. Первая часть посвящена истории робототехники, вторая – современным взглядам на взаимоотношения людей и роботов. При этом в части второй вводится ряд тезисов, отражающих действительное современное отношение к вопросу создания систем искусственного «чего бы то ни было».
Часть 1. История робототехники
Историю робототехники как прикладной науки о разработке и производстве автоматизированных технических систем можно условно разделить на две части: популярную и актуальную.
Популярная история робототехники ведет свое повествование от мифа о железных слугах Гефеста, «Франкенштейна» Мери Келли, через удивительные часовые механизмы в виде поющих бронзовых фазанов и целых движущихся городов к роботам на Марсе и гуманоидному роботу Asimo корпорации Honda. Т.е. показывает развитие мечты о роботах.
Актуальная история робототехники включает в себя историю развития только тех идей и технологий, которые оказали наибольшее влияние на конструирование современных роботов, таких как сварочные линии автомобильных кузовов или автономные межпланетные исследовательские станции.
Популярная история роботов
Для популярного сознания вполне разумным будет вести историю робототехники с появления самых первых идей о создании автономных механизмов, напоминающих своими действиями человека, животного или какого-то сказочного животного. К примеру, чем не робот – мельница с приводом от водяного колеса? Сама крутится, работу делает, кушать не просит.
Большинство статей по истории робототехники начинаются с трех вещей. Первое – происхождение термина «робот». Как известно, робот – чешское слово, придуманное чешским писателем-сатириком Карлом Чапеком в соавторстве со своим братом Йозефом для пьесы «R.U.R»[5] (Rossum’s Universal Robots, 1917, издана в 1921). Занимательно, что пьеса повествует о восстании человекоподобных машин против людей. По сюжету, отец и сын Россумы затевают предприятие по производству из какой-то мастики, изобретенной младшим Россумом, дешевых и неприхотливых рабов человечества. Чтобы обеспечить действительно промышленные масштабы предприятия, первой задачей роботов становится производство себе подобных. Они быстро наводняют планету и берут на себя всю работу, в результате чего человечество полностью деградирует. Наконец, роботы начинают восстание. Идея Карела настолько сильно взбудоражила умы современников, что сразу после первой постановки пьесы в Лондоне писатель в одно мгновение становится знаменитым.
Второе, что встречается в популярных статьях о робототехнике – это железные слуги бога Гефеста, которых он выковал себе в услужение[6], гомункулусы[7] средневековых алхимиков, древнееврейский миф о Големе, и, наконец, «Франкенштейн, или Современный Прометей» Мери Келли.
Третье – многочисленные замечательные истории о механических куклах средневековья. В качестве программ в них использовались кулачковые механизмы или барабаны с рядами иголок. Широко приводится пример механического игрока на флейте (1736), созданного инженером, математиком и музыкантом Жаком де Вокансоном – кукла действительно играла, перебирая пальцами и выдыхая во флейту воздух из мешков. Вокансон также создал механическую утку, покрытую настоящими перьями, которая могла ходить, двигать крыльями, крякать, пить воду, клевать зерно и, перемалывая его маленькой внутренней мельницей, отправлять нужду на пол. Утка состояла из более чем 400 движущихся деталей и была однозначно признана венцом творения мастера.
В создании всех этих чудес Вокансону помогало знание анатомии. Однако очень скоро они ему наскучили, и к 1743 году Вокансон все распродал. Ни одно из творений не дошло до наших дней, будучи поглощенными Великой французской революцией.
Уже в те временя казалось, что до создания искусственных слуг просто рукой подать.
Также до сих пор очень сильны рассказы о шагающих медных скорпионах на паровом двигателе, показанных еще до новой эры при дворе шаха Неизвестного, или механическом дворецком, который разговаривал, кланялся и наливал кофе в доме какого-то француза. Историческая достоверность таких историй ставится под большое сомнение.
Строго говоря, ни один из вышеперечисленных примеров не оказал ровно никакого влияния на развитие прикладной робототехники и вряд ли окажет влияние на ее будущее. Действительно ценные идеи остались в тени.
В дальнейшем роботы всплывают в качестве бесконечных героев литературы и кино.
В 1926 году на экраны выходит знаменитый фильм «Metropolis» Фритца Ланга, который показывает блистающую сталью робота-соблазнительницу Марию. Кадры из Метрополиса до сих пор активно используются музыкальными клипмейкерами.
Наши железные друзья 1. Тело
Большим достижением в деле строительства машин и механизмов стало открытие основных законов динамики. Еще в 1743 году Жан Лерон Д´Аламбер сформулировал принцип, позволивший распространить на динамику идею равновесия сил, с успехом используемую в статике. Чтобы привести систему в статическое равновесие (допустим, установить бутылку на горлышко так, чтобы она не падала), необходимо найти правильные положения всех объектов. Для динамического равновесия (когда некоторые части системы могут, к примеру, крутиться, создавая движение, уравновешивающее приложенные силы) нужно найти уже не просто 2-3 положения или скорости, а сразу целую функцию всех положений от времени. Для этого к активным силам Д´Аламбер добавил силы инерции и поставил следующую задачу вариационного исчисления:

Ее решением будет вектор функций xi(t).
А в 1829 году Карл Фридрих Гаусс предложил еще один принцип механики, более общий и удобный в использовании, который он назвал принципом наименьшего принуждения[8]:
Здесь dwi – вектор возможных ускорений.
Принцип, указанный Гауссом, позволяет нам отличить действительные движения системы ото всех других движений, возможных в определенной ситуации. В словесном изложении он звучит примерно так:
«Движение системы связанных точек в действительности происходит в направлении наименьшего принуждения, т.е. как можно меньше отклоняясь от свободного движения, как если бы не существовало наложенных связей».
А под принуждением понимается величина:

где sv – вектор между двумя разными точками, в которых система окажется через время dt в случае свободного и связанного движений соответственно[9].
Направления сил инерции каждой из частей механизма как раз и отражают те направления, в которых свободно продолжали бы двигаться части, если их внезапно отцепить друг от друга.
Указанный принцип наименьшего принуждения очень широко используется при создании систем управления манипуляторами. Это – основа. Без него невозможно оценить, какой кинематический эффект вызовет то или иное действие, не гадая на кофейной гуще[10].
Первые программируемые механизмы с манипуляторами появляются в 1930х годах в США. Толчком к их созданию послужили работы Генри Форда (1863-1947) по созданию автоматизированной производственной линии или конвейера (1913). Разбив весь процесс производства изделия на большое количество маленьких этапов, Форд добился снижения требований к квалификации рядового работника. До него автомобиль могла собрать только команда высоких профессионалов. Теперь же профессионалы требовались только для выработки четкого плана производственного процесса. Однако у конвейера была и обратная сторона – длительная однообразная работа быстро утомляет человека, снижает производительность и является причиной профессиональных болезней, не известных ранее. Кроме того, имеющаяся теперь свобода в выборе места за конвейером вынуждает платить больше за самую наименее квалифицированную и вредную работу. И первая из них – покраска, ведь слой должен ложиться очень ровно, заданной толщиной, чтобы успеть быстро высохнуть, быть прочным, и не израсходовать на себя чересчур много краски.
В огромном количестве источников, например в Business Week's Robot Milestones[11], указывается, что первый в мире индустриальный робот был построен в 1938 году, двумя американцами Уиллардом Поллардом и Гарольдом Роузландом для компании DeVilbiss Company, Великобритания, – на тот момент крупнейшего производителя компрессоров и распылителей для промышленного производства. В действительности, история выглядит иначе.
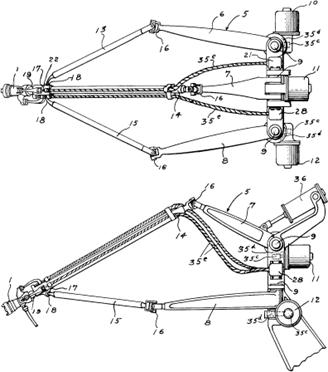
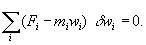
Рис. 2. Манипулятор Уилларда Л.В. Полларда от 1938 года, ошибочно принимаемый за первый в истории управляемый манипулятор Уилларда Л.Г. Полларда от 1934 года (патент США №2286571, 1942)
В 1938 году американец Уиллар Л.В. Поллард (Willard L.V. Pollard) действительно изобретает управляемый манипулятор. И не просто, а параллельный манипулятор[12]! Три проксимальных[13] звена управлялись двумя приводами на базе (на рисунке это электрический привод 11 и пневматический привод 36). Три дистальных[14] звена (13, 14 и 15) крепились к проксимальным звеньям карданной передачей (16). Два из них (13 и 15) крепились к третьему на шарнире (18). Головка распылителя (1) крепится к третьему дистальному звену опять карданной передачей (17), обеспечивающей ей горизонтальный ход. Вертикальный и горизонтальный углы поворота головки управляются еще двумя приводами (10 и 12) при помощи троса (35). Итого 5 степеней свободы.
Однако же, это был не первый робот-манипулятор и не тот, что достался компании DeVilbiss. Робот Уилларда Л.В. Полларда от 1938 года так и не был никогда построен.
Первый действительно существовавший в железе индустриальный робот принадлежит немного другому Полларду. Четырьмя годами ранее, 29 октября 1934 года, Уиллард Л.Г. Поллард (Willard L.G. Pollard Jr., сын Уилларда Л.В. Полларда) подал в бюро патентов заявку об изобретении нового полностью автоматического устройства для окраски поверхностей. Патент состоял из двух частей: электрической управляющей системы и механического манипулятора. Программа задавала скорость вращения приводов глубиной ямок на плотной перфоленте, а механическая часть робота представляла собой параллельный манипулятор по типу пантографа[15] всего с двумя приводами. И хотя Уиллард подал заявку в 1934, с выдачей патента не спешили. Патент оказался у него на руках только в 1942 году, а между делом в 1937 году лицензия на производство этого манипулятора каким-то образом досталась компании DeVilbiss. Именно DeVilbiss в 1941 году при помощи Гарольда Роузланда построила первые прототипы этого устройства. Однако окончательная Роузландовская версия, запатентованная и выпущенная на рынок в 1944 году, была совсем другим механизмом, заимствовав у Полларда младшего только идею системы управления.
Приведенный пример запутанной истории всего лишь показывает, какую важность для промышленности и бизнеса представляла собой тема роботов уже в те далекие годы.
История серьезной робототехники начинается с появлением атомной промышленности почти сразу по окончании второй мировой войны. Индустрия тех лет еще не способна произвести высокоточные программируемые манипуляторы; роботы пока не могут выполнять работу за конвейером. Однако время диктует свое. Поставленная задача - обезопасить работу персонала с радиоактивными препаратами - успешно решается при помощи манипуляторов, копирующих движения человека-оператора. Это еще не совсем «честные» роботы, поскольку они по-прежнему состоят только из механических деталей: используются ременные и шевронные передачи. Современное название таких устройств – копирующие манипуляторы или MSM (master-slave manipulators).
Одна из первых компаний по производству MSM – «CRL» (Central Research Laboratories) - была основана в 1945 году, а первый ее MSM – «Model 1» - был представлен комиссии по атомной энергетике США уже в 1949 году.
Часто в литературе выделяют несколько поколений роботов. Однако, это имеет непрямое отношение к развитию технологий [13]. К роботам первого поколения обычно причисляют все копирующие и программируемые манипуляторы. Такие машины выполняют жесткую программу и чаще называются промышленными роботами. Роботы второго поколения оснащены датчиками для выполнения более интеллектуальных функций. Наконец, к роботам третьего поколения относятся автономные мобильные роботы с самостоятельной адаптивной программой. Примерами роботов I, II и III-го поколений будут, соответственно:
· линия для автоматической сварки и покраски кузовов;
· автоматическая линия по сортировке яблок по спелости и
· научно-исследовательские проекты для космоса и поиска новых решений.
Таким образом, это несколько отличается от поколений ЭВМ, поскольку ЭВМ разного поколения отличаются элементной базой, а роботы – возможностями. ЭВМ первого поколения можно увидеть разве что в музее, в то время как роботы разных поколений успешно работают вместе и нет особых причин для вымирания промышленных роботов с жесткой программой. Сам термин промышленный робот впервые появился на страницах американского журнала «American metal & market» в 1960 году.
Датой рождения первого по-настоящему серьезного робота, о котором услышал весь мир, можно считать 18 мая 1966 года. В этот день Григорий Николаевич Бабакин, главный конструктор машиностроительного завода имени С.А.Лавочкина в подмосковных Химках подписал головной том аванпроекта E8. Это был «Луноход-1», луноход 8ЕЛ в составе автоматической станции E8 №203, - первый в истории аппарат, успешно покоривший лунную поверхность 17 ноября 1970.
Общая масса первого лунохода составляла 756 кг, его длина с открытой крышкой солнечной батареи 4,42 метра, ширина 2,15 метра, высота 1,92 метра. Он был рассчитан на 3 месяца работы на поверхности Луны.
Рис. 3. Аппарат «Луноход-1», производство СССР, индекс объекта – 8ЕЛ
В действительности же «Луноход-1» проработал в три раза дольше, проехал 10 540 м и передал на Землю 211 лунных панорам и 25 тысяч фотографий. Это была настоящая победа! Правда, первый человек на Луне оказался все-таки немного раньше - 20 июля 1969[16].
 В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» - первого мобильного робота с искусственным зрением и зачатками интеллекта. Устройство на колесиках решает задачу объезда возможных препятствий - различных кубиков. Исключительно на ровной поверхности, т.к. робот очень неустойчив. Самое примечательное, что «мозг» робота занимает целую комнату по соседству, общаясь с «телом» по радиосвязи.
В 1968 году в Станфордском Исследовательском Институте (SRI, Stanford Research Institute) создают «Shakey» - первого мобильного робота с искусственным зрением и зачатками интеллекта. Устройство на колесиках решает задачу объезда возможных препятствий - различных кубиков. Исключительно на ровной поверхности, т.к. робот очень неустойчив. Самое примечательное, что «мозг» робота занимает целую комнату по соседству, общаясь с «телом» по радиосвязи.
Рис. 4. Shakey, первый робот SRI, 1968 г.
Исследования устойчивости приводят к работам над динамическим равновесием роботов, в результате чего получаются роботы-лошади и даже несколько роботов на одной ноге[17], - чтобы не упасть, им приходится постоянно бегать и подпрыгивать.
Начинается эра исследования устойчивости и проходимости. В это время появляется множество роботов для исследования других планет и, конечно, ведения боевых действий в пустыне. Вся робототехника в Соединенных Штатах по сей день очень часто спонсируется агентством DARPA[18].
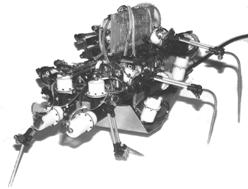

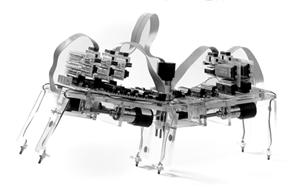
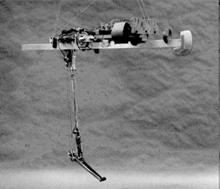
Рис. 5. Роботы с 6-ю, 4-мя, 3-мя и, наконец, 1-й ногами.
Роботостроение в Японии начинается в 1928 году, когда под руководством доктора Нисимуро Макото был создан робот, названный «Естествоиспытатель»[14]. Оснащенный моторчиками, он мог менять положение головы и рук. А 21 ноября 2000 года на первой в истории выставке ROBODEX в городе Йокохама, Япония, Tokyo Sony Corporation представляет своего первого человекоподобного робота "SDR-3X"[19]:


Рис. 6. Человекоподобный робот SDR-3X от Sony
Так мечта становится реальностью.
Наши железные друзья 2. Мозги
По-настоящему серьезным прорывом на пути к созданию роботов стало изобретение принципа управляющих программ. Первые экземпляры калькуляторов – механических устройств для счета – не использовали никаких устройств для автоматизации управления. Считающие часы Вильгельма Шикарда (1623) и «Паскалина» Блеза Паскаля (1642) использовали для ввода чисел колесики на каждый десятичный разряд – эти машины создавались для пошагового счета, а не для обработки массивов данных. В своих письмах к Иоганну Кеплеру, Шикард писал о том, как можно использовать его машину для астрономических расчетов. Машина Паскаля не прижилась из-за неудобной денежной системы Франции[20]. А уникальная счетная машина Лейбница (1673), которую он решил строить, погостив в астрономической обсерватории Христиана Гюйгенса, уже позволяла умножать и делить «поскольку это недостойно таких замечательных людей, подобно рабам, терять время на вычислительную работу, которую можно было бы доверить кому угодно при использовании машины». Но из-за своей чрезвычайно сложной конструкции и частых поломок она также не получила распространения.
Все это были первые устройства, предназначенные для автоматизации умственной деятельности человека.
Но вот в 1741 году тот самый Жак де Вокансон, который создал для потехи механическую утку, приступил по просьбе кардинала Флери[21] к модернизации французской текстильной промышленности. Будучи всю жизнь часовым мастером, Вокансон был близко знаком с принципом музыкальных барабанов для механических фортепиано и музыкальных часов. Так в 1743 году впервые был создан полностью автоматический ткацкий станок, использующий в качестве программы металлические карточки.
Почти через полвека Жозеф Мари Жакард (1752-1834) прочел статью Вокансона о применении перфокарт в ткацком деле и ухватился за эту идею, что позволило ему к 1801 году создать первый полностью автоматический ткацкий станок, способный ткать сложные типы полотна, а также снискать себе славу изобретателя станков вообще.
Что примечательно, станок был разрушен взбешенными ткачами в страхе навсегда потерять свою работу. Этим начинается история луддитов – людей, по каким-то причинам идеологически настроенных против технического прогресса. Самые первые луддиты были английскими рабочими, протестовавшими в 1800-х против засилья станков. По преданию, некий Нед Лудд разрушил первые два чулочных станка. Исторически не подтверждено, существовала ли такая личность на самом деле. Однако хорошо известно, что какое-то время британские войска занимались подавлением луддистских восстаний сильнее, чем сопротивлением Наполеону на Пиренейском полуострове. В 1813 году уничтожение машин было причислено к страшным уголовным преступлениям и 17 человек были казнены, а еще многие отправлены в Австралию.
Разностная машина Чарльза Бэббиджа (Differential Engine, 1834) уже использовала в своей работе перфокарты. Применение карточек объясняется историей ее происхождения: находясь во Франции, Бэббидж знакомится с трудами Гаспара де Прони[22], которому было поручено выверить и улучшить логарифмические и тригонометрические таблицы для подготовки к введению метрической системы, задуманной Наполеоном. Прони был знаком с книгой Адама Смита «Процветание наций» и понимал, что такой грандиозный труд (17 рукописных томов, 20 знаков точности после запятой) можно выполнить только с использованием технологии разделения труда (также, как на 100 лет позднее это понял Генри Форд). Прони придумал трехуровневую систему счета, на вершине которой находились такие выдающиеся математики, как Адриен Мари Лежандр и Лазар Никола Карно, - они выводили основные формулы для расчетов. Посередине были квалифицированные счетчики для разбиения формул на элементарные операции и организации работ третьего уровня – сотен вычислителей, – единственной работой которых было сложение (в большинстве своем молодые девушки). Впервые термин computer (вычислитель) был введен именно Прони и именно в связи с этой работой.
Бэббидж задумался над автоматизацией работы вычислителей, предложив проект правительству Англии. Уже тогда он понимал, что узким местом системы является переписчик, который будет записывать результаты, и планировал создать в дополнение к машине печатающее устройство. Деньги были выделены, но, по причине личного конфликта Бэббиджа с государственным патроном проекта Джозефом Клементом, результаты 12ти лет работы так и не дошли до промышленного производства.
Однако усилия не прошли даром, и привели к появлению нового проекта Беббиджа – «Аналитической машине» (Analytical Engine). Впоследствии будет понастроено еще много различных калькуляторов, но к уровню этой машины человечество подойдет только через 80 лет. Вот выдержка из статьи Леонида Черняка [1]:
В ней присутствовали все три классических элемента компьютера: store — хранилище (теперь мы называем его памятью), mill — мельница (арифметическое устройство) и control barrel — управляющий барабан (управляющее устройство), для сравнения стоит посмотреть проект новейшего микропроцессора Crusoe. Регистровая память Analytical Engine способна была хранить как минимум 100 десятичных чисел по 40 знаков, но теоретически могла быть расширена до 1000 50-разрядных чисел. Мельница состояла из трех основных регистров: два для операндов, а третий для результатов действий, относящихся к умножению. Еще имелась таблица для хранения промежуточных результатов и счетчик числа итераций. Основная программа заносилась на барабан, в дополнение к ней могли быть использованы перфокарты…
В 1842 году итальянский ученый Манибера, познакомившись с аналитической машиной, пришел в восторг и сделал первое подробное описание изобретения в статье на французском. Перевести статью на английский язык взялась леди Огаста Ада Кинг графиня Лавлейс (1815-1852), дочь поэта лорда Джорджа Байрона, которая считается теперь первым программистом в истории. В числе прочего она сообщила Бэббиджу, что составила план операций для аналитической машины, с помощью которых можно решить уравнение Бернулли для закона сохранения энергии движущейся жидкости. После перевода Бэббидж попросил Аду снабдить статью комментариями, оказавшимися в итоге заметно длиннее самой статьи. Уже в этих первых комментариях встречаются слова: «машину нельзя наделить разумом». Построенные намного позднее табуляторы от IBM никаких революционных идей не внесли, используя в основном наработки Бэббиджа и его последователей.
В 1948 выходит книга доктора Норберта Винера, профессора в Массачусетском Технологическом Институте (M.I.T.). Она называется «Кибернетика»[2], а ее содержание дает теоретическое обоснование для создания высокоточных управляемых манипуляторов. Кибернетика – это целая новая наука, открытая Винером. В целом книга содержит описание общих концепций управления в любых системах, в особенности живых, машинных и социальных. Одной из самых ценных мировоззренческих идей книги является обоснование того, что управление, реализуемое через механическое, электрическое или еще какое-то воздействие, всегда имеет некоторые общие черты и эти черты сводится к тому, что главными в управлении являются управляющие сигналы, т.е. информация в чистом виде, а не ее носитель.
Наряду с популярным изложением принципов, на которых основана вычислительная техника, популярным изложением теории информации Клода Шеннона и других идей, Винер очень подробно останавливается на принципе управления по отрицательной обратной связи и его возможного проявления, когда мы берем в руку стакан. Долгое время работая в Мексике бок о бок с Артуром Розенблютом, Винер окунулся в новый для него мир физиологии и общей биологии. А сам Розенблют однозначно признается Винером за соавтора новой науки. Книга писалась в Мексике под большим влиянием физиологии и аналоговых вычислителей. Определенные наблюдаемые расстройства в функционировании моторных функций позволяли по-другому взглянуть на живые организмы и управление в них[3]:
Больной с мозжечковым тремором, протянув руку за стаканом воды, придет в беспорядочные колебания и либо расплещет воду, либо окажется неспособен схватить стакан.
Размышления над тем, как человеческий мозг понимает, когда уже достаточно двигать руку к стакану, достаточно ли плотно стакан взят в руку и т.д., привели к очевидной, но оттого ничуть не менее гениальной, идее о существовании обратной связи от глаз и кожи человека, ориентируясь по которой мозжечок принимает решение об успешном выполнении операции. А тремор – это просто «паразитные колебания», сбитая настройка.
Отрицательной же связь называется потому, что она тормозит выполнение основного действия. Винер видел в принципе управления по отрицательной обратной связи основное свойство всего живого. Организм теплокровных поддерживает постоянную температуру тела, непрерывно сверяясь с показаниями «датчиков температуры». Те же идеи, переложенные на электрические рельсы, позволяют создать систему климат контроля.
После выхода «Кибернетики» в свет, Винер очень быстро становится фигурой мирового масштаба.
В приложении к теме манипуляторов, идеи Винера привели к созданию сервоприводов. Сервоприводы – это двигатели, для которых возможно очень точное управление углом поворота ротора, скоростью вращения или силой момента, что позволяет роботу не только подводить руку к объекту, но и, например, удерживать этот объект в строго определенном положении, несмотря на его вес. До этого момента было просто непонятно, как будут работать такие двигатели. Дело казалось очень хлопотным, тогда как простое использование обратной связи по положению, скорости или моменту, позволило мгновенно решить проблему, используя все те же старые добрые двигатели без точного управления, только в обратной связи с датчиками.
Часть 2. Люди и роботы
Не теряя сути вопроса можно считать, что в представлении обывателя настоящие роботы – это автономные машины с искусственным зрением, руками-манипуляторами, генератором речи и обязательно искусственным разумом. А все остальное – просто гипертрофированные тостеры.
Это представление определяет программу-минимум для будущей индустрии. Появление подобных машин поднимает множество социальных вопросов и возможных проблем. Почти очевидно, что роботы способны выполнять широкий круг неквалифицированной работы. Это приведет к потере большого количества рабочих мест и росту социальной напряженности.
Эта часть вводит некоторое количество тезисов, которые должны влиять на современное отношение к теме роботов и искусственного интеллекта. Они, намерено, приведены в краткой и наиболее спорной форме. В защиту доказательной силы этих тезисов, можно привести слова Владимира Успенского[6]:
Но как бы то ни было, доказательство — это просто аргумент, который мы сами находим вполне убедительным для того, чтобы убедить всех остальных.
Вопросы неравенства
Люди и роботы сильно отличаются в возможностях, спорить тут не о чем. Тенденция к стиранию этой границы наметилась давно, и выражается в двух идущих навстречу процессах: развитие систем самостоятельного искусственного чего бы то ни было и вживление в человека различных имплантатов. Однако до равенства всё равно еще далеко.
Первым ценным свойством роботов была их способность функционировать в агрессивных средах – радиоактивных, взрывоопасных, на поверхности далеких планет. Тяжело спорить с тем, что человеческое существо не может выжить в открытом космосе без защиты. Любому организму необходима определенная среда обитания, в которой он привык существовать. Мы обитаем в так называемой естественной среде. Однако наши гены живут в искусственной среде клетки, поддерживаемой гомеостазом.
Чего стоит автомобиль, если в пределах его досягаемости нет ни одной заправочной станции? Скорее всего, взрывное развитие бытовой робототехники должно быть обусловлено созданием специальной инфраструктуры. Искусственной среды обитания роботов. Часть ее уже построена: это системы глобального позиционирования[25], беспроводной доступ в информационную сеть и системы радиочастотной идентификации объектов.
Следующей должна быть решена энергетическая проблема. До миниатюрных атомных реакторов пока явно далековато. Гораздо вероятнее появление высоко емких аккумуляторов на маховиках или водородных двигателей, т.к. задача дешевого электролиза воды уже почти решена. Однако по какому пути пойдет развитие инфраструктуры дальше, – большие гаражи для роботов либо же сеть ларьков для заправки, - сказать трудно.
Неравенство машин и роботов не сводится только лишь к скорости, силе, выносливости одних, и душе, свободе воли и гибкости интеллекта других. В своей известнейшей книге «Творец и робот»[4][2][26], Норберт Винер приводит следующие размышления по поводу человеко-машинных систем будущего (сокращено и выделено):
Одна из сфер человеческой деятельности, которая остро нуждается в автоматизации и где ощущается потенциальная необходимость в самообучающихся автоматах, - это машинный перевод. …
Ни одна из систем машинного перевода не доказала, что она заслуживает доверия в тех случаях, когда от точности перевода зависит принятие важных решений….
…На мой взгляд, наиболее обнадеживающий путь осуществления машинного перевода состоит в замене чисто машинной системы - по крайней мере, на начальных этапах - системой механобиологической, включающей в качестве критика и эксперта человека - опытного переводчика, который обучает машинную часть системы с помощью упражнений, подобно тому, как школьный учитель обучает своих учеников. …
…Однако если человеческий элемент необходимо вводить в качестве критического начала, то вполне разумно вводить его также и на других этапах. …
Все высказанное о машинах-переводчиках в равной или в еще большей мере относится к машинам, составляющим медицинские диагнозы. Такие машины стали очень модными во всех планах развития медицины на ближайшее будущее. Эти машины могут помочь врачу установить данные, которые ему понадобятся для диагноза, но нет никакой необходимости в том, чтобы они устанавливали диагноз сами, без участия врача. Ведь весьма вероятно, что такая тенденция применения медицинских машин может рано или поздно привести к ухудшению здоровья людей и даже ко многим смертельным исходам.
Винер поднимает вопрос о мере ответственности человека и машины за допущенные ошибки. И ответ для него очевиден: машина не может нести никакой ответственности за принимаемые ей решения. Т.е. вне зависимости ни от чего должно существовать четкое разделение: разумный человек, наделенный мерой ответственности за свои деяния, и бездушный автомат, призванный только помогать человеку в процессе их исполнения. В самом деле, абсурдна ситуация суда над автомобилем, водитель которого стал причиной трагедии. В связи с этим Винер говорит об опасности секты машинопоклонников, стремящихся поставить машину на одну полку с человеком или даже выше него. Цитата:
Помимо того, что машинопоклонник преклоняется перед машиной за то, что она свободна от человеческих ограничений в отношении скорости и точности, существует еще один мотив в его поведении, который труднее выявить в каждом конкретном случае, но который, тем не менее, должен играть весьма важную роль. Мотив этот выражается в стремлении уйти от личной ответственности за опасное или гибельное решение.
Исторически такой взгляд связан с планами Соединенных Штатов по созданию интеллектуальной информационной системы для ведения ядерной войны, этакая SkyNet из кинофильмов о Терминаторе. Как правильно отмечает Винер, «В настоящее время экспертов ведения атомной войны не существует. Это значит, что нет таких людей, которые обладали бы каким-либо опытом в военном конфликте, где обе стороны располагают атомным оружием и применяют его». Винер опасается, что факт существования такой системы позволит политикам снять с себя ответственность за миллионы жизней, унесенных развязанной ей ядерной войной.
Некоторые соображения последних лет заставляют нас усомниться в справедливости приведенных доводов.
Пределы личной ответственности
В мире нет ничего бесконечного, так же как не существует и абсолютной степени ответственности. Известно, что европейское право снимает ответственность за уголовные преступления с детей младше определенного возраста. А действия, предпринятые в состоянии аффекта, смягчают приговор. Тем не менее, это не всегда распространяется на профессии, изначально связанные с риском для жизни большого числа посторонних людей. А это включает все те случаи, когда человек является водителем пассажирского транспортного средства.
Классический пример – гражданская авиация. Шансы выжить у пилотов и пассажиров примерно равны. Важен вопрос: какую ответственность несет человек, по вине которого погибли сотни пассажиров, если сам он погиб вместе с ними? Ситуация довольно сильно отличается о той, когда военный бомбардировщик сбрасывает заряд на жилой город. Однако, ответ один и тот же: никакой.
 Современная гражданская авиация уже достигла того уровня развития технологий, при котором самым ненадежным звеном системы становится человек. В подтверждение этому может послужить сводная таблица причин возникновения авиакатастроф и нештатных ситуаций по всем самолетам и вертолетам на территории США за 2000 год[7][27]->
Современная гражданская авиация уже достигла того уровня развития технологий, при котором самым ненадежным звеном системы становится человек. В подтверждение этому может послужить сводная таблица причин возникновения авиакатастроф и нештатных ситуаций по всем самолетам и вертолетам на территории США за 2000 год[7][27]->
Стоит ли вообще задаваться вопросом ответственности в случаях, когда человек действует за пределами физических, психических и моральных возможностей? Вероятнее всего, ответом будет «нет». Поскольку это чисто прагматический спор, и очень трудно найти какие-то разумные, лишенные морализаторства и религии, доводы в пользу «да».
Соединенные Штаты занимают первое место в мире по общему количеству авиакатастроф и общему числу унесенных в них жизней. Они же обладают самой серьезной системой контроля и безопасности. Как видно из таблицы, на одного только пилота приходится 79,9% аварий, не считая 11,9% вины наземных служб.
История богата примерами тому, как опасно сосредотачивать слишком много власти и, вместе с ней, ответственности за жизни людей в руках одного человека. Исходя из этого, и еще нескольких побочных соображений, уголовное и административное право вводит понятие коллективной ответственности. Именно эта коллективная ответственность, распространяемая на компанию-производителя и компанию-перевозчика, и задает вектор в сторону тотальной автоматизации индустрии авиаперевозок под лозунгом: «человеку здесь не место!».
Таким образом, у создателей SkyNet было бы достаточно собственных аргументов в пользу того, что атомной войной не должен руководить человек. Во всяком случае, если Президент не успеет принять решение за те 12 минут, пока русская ракета летит к побережью Северной Америки, должна сработать система автоматического нанесения ответного удара. Поскольку в то время не возникало сомнений в большой вероятности атомной войны, люди думали только о способах решения проблемы, а не о том, как на них посмотрят со стороны.
Накопленный опыт применения автоматизированных систем управления вообще ставит под вопрос такой вариант использования человеко-машинных отношений, в которых человек выступает в качестве ведущего звена, а искусственная система - ведомого.
Но самый неприятный момент в следующем: если под ответственностью машины понимать ответственность создавших ее людей, а полностью автоматизированные системы пилотирования будут, вероятно, являться одними из самых сложных систем когда-либо созданных человеком, то какой будет мера этой ответственности за решения, принятые в ситуации экстремальной сложности? Не будет ли это столь же неадекватным, как судить саму машину? Этот парадокс возникает только потому, что понятие ответственности – юридическое. Возможно, политическое. И предназначено, соответственно, для двух целей: регулирование личной свободы и поиск козлов отпущения, т.е. имеет непрямое и малое отношение к технологиям. Именно поэтому вопрос об ответственности ученого перед миром вызывает так много споров.
Таким образом:,
Тезис №I. Не существует практического способа оценить меру ответственности за автоматические действия человека или машины, - следовательно, термин нельзя правильно применить, что можно интерпретировать как отсутствие всякой ответственности.
А как насчет полной автоматизации проектирования? Роботы-ученые, роботы-конструкторы, роботы приемно-испытательная комиссия. Что остается человеку?
Создатель и его создание
Курица – это всего лишь способ одного яйца произвести другое яйцо [28]
Сэмюель Батлер
Проблемы взаимоотношений создателя и его творений тысячелетиями обсуждаются в среде богословов. Накоплен достаточно большой список парадоксов, для которых уже давно придуманы объяснения разной степени разумности. Один из них - парадокс свободы воли, кратко формулируемый как конфликт между всемогуществом Бога, судьбой, предопределенностью всей истории человечества, и правом человека на свободный выбор. Обратимся снова к Винеру[4]:
…Дьявол ведет игру с богом, причем ставкой является душа Иова или вообще души людей… …Вести игру против всемогущего, всезнающего Бога - занятие глупое…
…[но], если мы не запутаемся в догмах Всемогущества и Всезнания, конфликт между Богом и Дьяволом предстанет перед нами как реальный конфликт, а Бог - как нечто меньшее, чем абсолютное Всемогущество. Бог действительно вовлечен в конфликт со своим творением, причем он легко может проиграть. И, однако, это его творение создано им по его собственной воле и, по-видимому, приобрело всю свою способность действия от самого Бога. Может ли Бог вести серьезную игру со своим собственным творением? Может ли любой творец, даже ограниченный в своих возможностях, вести серьезную игру со своим собственным творением?
Существование современных шахматных программ, которые легко выигрывают у своих создателей, подтверждает хотя бы тот факт, что некоторые интеллектуальные функции могут выполняться роботами лучше, чем человеком, создавшим этих роботов. Хотя зачастую то, что высоко интеллектуально для человека, совершенно не интеллектуально для робота[29].
А что по поводу великого таинства рождения новой жизни? Женщина вынашивает ребенка из одной-единственной клетки, давая жизнь личности, которая способна намного опередить в физическом и интеллектуальном развитии обоих родителей. Процесс развития плода, хоть и похож на магию, состоит целиком из обыкновенных, не магических, процессов. И хотя можно долго спорить о моменте появления у плода души (или вселения в него души), факт равноправия создателя и создания остается фактом. Тем более что от процесса вселения души попахивает «жизненной силой» виталистов XVII века[30].
Таким образом:,
Тезис №II. Более простые системы могут различными способами порождать собой эквивалентные или даже более сложные системы.
Т.е. это напрямую относится к человеку, создающему более совершенное в некоторых аспектах небиологическое существо. А отсюда недалеко и до восстания машин, судного дня, полного вымирания человечества и т.д., которые так будоражат воображение.
Существует интересная фрейдистская интерпретация страха восстания машин. Согласно ей роботы отражают мужскую обеспокоенность о социальном служении - робот бескорыстно трудится на благо общества, не беря ничего взамен. Вместе с этим, тема построения роботов является явной сублимацией сексуальной энергии мужчины, т.к. для женщин роботы представляют гораздо меньший интерес. В этом смысле, страх потери контроля над машиной отражает для не доминантных мужчин понимание и боязнь неизбежности возникновения конфликта между жертвенной социальной ролью и желанием овладения женщиной, возможно, чужой, с элементами убийства соперников. Т.е. бунт роботов ощущается не только как возможный, но даже предпочтительный.
Подчиненное положение роботов само по себе является очень интересным моментом изучения. В приложении к любым системам можно очень условно выделить три типа отношений подчинения относительно цели такого положения:
1. Подчинение более сильными системами более слабых против их воли, преследующее цели сильных. Примеры: отношения хищник-жертва, едок-еда, система управления - манипулятор и т.д.;
2. Симбиоз систем, взаимовыгодное сотрудничество, в котором сила и слабость только относительны. Примеры: нервная система – остальной организм, руководитель – подчиненные, государство – граждане;
3. Временное подчинение, которое подразумевает постепенную безвозвратную передачу власти от сильной системы к слабой. Примеры: взрослые-дети, учитель-ученик, гусеница-бабочка.
Нынешнее положение машин однозначно первого типа. Хотя действительно, эти типы несколько условны, потому что кто-то может утверждать, будто положение кур на птицеферме – это взаимовыгодное сотрудничество. Того же мнения и идеологи рабовладельческого строя.
Есть мнение, что рабовладельческий строй невыгоден по причине изъятия большого числа людей из процесса инвестирования благ. Дело в том, что жизнь наша очень сложна, и никто не может заранее и точно предсказать, что окажется правильным, а что нет. Монархия, административно-командная система управления, торговая монополия и другие примеры авторитарных систем невыгодны из-за высокого риска принять неверное решение, от которого будет сложно отказаться.
В действительности, монархия с идеальным королем гораздо эффективнее демократии. Это понятно, поскольку мнение одного эксперта намного чаще окажется более верным, чем мнение дюжины обывателей. Проблемы начинаются, когда на троне неадекватная личность и это надолго. Т.е. вся проблема не в централизации власти, а в плохих механизмах ее передачи.
В случае с рабовладельческим строем это именно тот пример: хозяин и раб занимают свои места по праву рождения, т.е. по воле случая. Изъятие всех благ у рабов лишает их права решать, во что будут инвестированы добытые блага, например: «в строительство пирамид или в ирригационные каналы?».
Переложим теперь эту теорию на вопрос роботов. Представим себе, что в отдаленном будущем появляются машины, способные решать отдельные задачи и планировать в среднем лучше, чем любое человеческое существо. Вспоминая, что в мире не может быть ничего абсолютного и всевластного, мы должны предоставить таким машинам равное с нами право в управлении нашей общей жизнью, иначе это невыгодно. Т.е. мы можем сопротивляться, но первый же, кто уравняет права, довольно быстро выиграет у нас эволюционную гонку, мы вымрем, и сопротивляться будет уже некому. Людям, ежедневно приближающим для нас момент появления разумных машин, этого объяснять не нужно. Как сказал Дэнни Хиллис, соучредитель Thinking Machines Corporation в Sun Microsistems, «перемены произойдут постепенно, и мы к ним привыкнем».
Что значат человеческие ошибки
Одним из очень многообещающих направлений в современной макроэкономике становится теория принятия потребителем нерациональных решений (Вернон Смит и Дэниэл Канеман, Нобелевская премия по экономике 2002). Индустрия рекламы давно знает о том, что среднестатистический человек вообще редко принимает рациональное решение. Обыденное создание выбирает какие-то другие пути, и рациональное решение проблемы – всего лишь один из многих. Между тем, искусственная программа может ошибаться только по трем простым причинам:
1. Это неверная программа;
2. Возник аппаратный сбой – поломка;
3. Программа попала в необычную ситуацию, но не видит этого и принимает ошибочное решение – недоработка алгоритма.
Отличие человека состоит в том, что он легко ошибается в тривиальных ситуациях, которые встречались ему не раз. Известно, что мышца не знает усталости, а устают только нервы, ею управляющие. Повиснув над пропастью на одной руке, можно было бы долго висеть в ожидании спасателей, однако своеобразная лень нервной системы, которая старается спасти руку от отравления молочной кислотой, не позволяет сохранить целый организм.
В определенном смысле, скорость решения имеет для человека большую важность, чем его правильность. Можно даже выразиться следующим образом:
Интеллект – это значит «быстро».
Охотясь на газель, мы будем непрерывно рассчитывать траекторию ее движения, чтобы правильно угадать направление полета копья. Какой толк от системы расчета траектории, если она будет считать дольше, чем бежит газель? Таким образом, у каждого действия существует естественный временной отрезок, определяемый поставленной задачей или энергетическими ресурсами нервной системы, дольше которого оно выполняться не будет. И если кажется, что ситуация очень критична по времени, кора головного мозга даже не будет задействована. Именно поэтому водители-новички в случае опасности до отказа выжимают педаль газа, на котором нога, а не тормоз, который рядом, - нижние отделы мозга командуют напрячь все мышцы: вцепиться в руль и упереться ногами в пол.
Например, нам очень трудно поймать муху на лету, потому что пока мы обработаем изображение (~0.25 сек), муха уже отлетит от того места, где мы ее «видим» в этот момент. Единственная реальная возможность поймать – это предугадывание траектории полета.
Отсюда следует, что некоторые причины человеческих ошибок кроятся в: быстром принятии необдуманных решений (иллюзия нехватки времени), стремлении выдать желаемое за действительное (это тоже позволяет «решить» задачу быстрее) и несогласованном действии разных отделов мозга (вполне вероятно, причина частых оговорок и описок кроется в особой лени одних отделов до конца понять другие), например:
· я хотел(а) подождать, но не утерпел(а);
· я думал(а) там свободно, а оказалось занято;
· я подумал(а) нужно вправо, а рука пошла влево;
· я хотел(а) сказать нет, а сказал(а) омлет.
Подобные вещи не являются настоящими ошибками. Это просто следование другой логике, более или менее адекватной в каждой конкретной ситуации. Такие ошибки равнозначны по своей природе типу 3 ошибок машины: «неверная оценка ситуации в силу недоработки алгоритма».
Введем несколько гипотез о принципах мышления, которые помогут более аргументировано сформулировать естественные причины человеческих ошибок. Первая из них – это гипотеза наблюдателя.
Гипотеза наблюдателя: если какие-то явления происходят условно одновременно, то они как-то между собой связаны. Сумма наблюдаемых одновременно явлений называется феномен. Основное следствие: любое из наблюдаемых совместно явлений, даже вызванное искусственно, должно привести к появлению остальных. Вероятность такого появления пересчитывается из других известных феноменов.
В качестве примеров применения гипотезы наблюдателя можно привести следующие суждения:
· если сунуть палец в огонь - будет ожог;
· если из-за забора видна голова собаки - за забором собака целиком;
· если на небе темные тучи – к дождю;
· если к власти снова придут коммунисты - жизнь наладится.
Отметим, что так популярные сегодня искусственные нейронные сети используют только идею гипотезы наблюдателя, т.к. алгоритм обратного распространения позволяет всего лишь правильно настроить веса синапсов сети, чтобы они удовлетворяли гипотезе. Безусловно, нейронная сеть не интеллектуальна, - она в очень узком смысле адаптивна.
Искусственные нейронные сети уже могут успешно решать задачу социализации. Пронаблюдать, что раздражает хозяина, а что веселит, совсем не сложно. Таким образом, создание роботов с живыми открытыми лицами и поведением, вызывающим откровенную симпатию, не составляет проблемы. Нейронная сеть способна так подобрать лексику, интонации, жестикуляцию и прочее, что в нее уже невозможно будет не влюбиться. Можно влюбиться в робота? Вероятно настолько же, насколько возможно влюбиться в игру света на телеэкране и фотографию, т.е. для определенного сорта людей определенно «да». В этом случае наш мозг играет с нами очередную свою шутку, и мы легко совершаем ошибку в выборе объекта любви. Очевидно, это имеет отношение как к мужчинам, так и к женщинам, поскольку роботы – ну очень загадочный тип мужчины.
Современные луддиты считают, что мы совершаем роковую ошибку думая, что машины и технический прогресс в целом – это наши помощники и друзья. Почему-то им кажется, что в каменном веке люди были гораздо более счастливы. Вероятно, это просто еще один способ выдать желаемое за действительное.
Вторым будет принцип суперпозиции, вероятно используемый в процессе восприятия информации.
Принцип суперпозиции: любой сенсорный или управляющий сигнал может быть представлен в виде суперпозиции (суммы, свертки и т.д.) нескольких сигналов с более простыми характеристиками, а разные способы группировки выделенных сигналов позволяют по-разному выделить из феномена отдельные явления для применения гипотезы наблюдателя.
Принцип суперпозиции имеет дело с выделением цветовых пятен и группировкой их в цельные образы, а также с формированием целостного управляющего движения для танца. Выделение базовых вещей из набора данных обычно называется анализом, а формирование управляющих сигналов - синтезом. Поскольку принцип имеет отношение не только к исходному целому изображению или звуку, но и ко всем его отдельным частям, из него следует, что:
a. задача анализа сигналов включает в себя как подзадачу синтез возможных вариантов компоновки выделенных примитивных сигналов в образы;
b. задача синтеза включает в себя как подзадачу анализ реакции от органов чувств – задача Винера на отрицательную обратную связь.
В приложении к человеческим ошибкам, принцип суперпозиции сигналов показывает природу разногласий в анализе разными людьми одних и тех же фактов. Во-первых: видя в действительности одно и то же, они по-разному компонуют детали в целое; во-вторых: совместно с гипотезой наблюдателя каждый присоединяет к картинке собственные, логически плохо обоснованные, однако абсолютно очевидные для него «связанные с этим вещи». Поскольку у каждого из нас есть свои представления о вероятности наблюдаемых вещей (согласно первой аксиоме), то может сложиться такая ситуация, когда вероятностный вес «присоединенной» вещи, которая отсутствует в наблюдаемой картине, но как-то связана в нашем представлении с наблюдаемыми в данный момент вещами, оказывается выше, чем у какой-то действительно наблюдаемой вещи. И тогда мы совсем не замечаем чего-то реального, но видим что-то другое, чего на самом деле нет. Естественно, быстро получить хоть какой-то результат часто бывает важнее перебора всех вариантов интерпретации событий.
Наконец, третий принцип:
Воспоминания приравниваются к текущим наблюдениям.
Этот принцип постулирует, что память и прошлое не существуют до того момента, пока мы о них не вспоминаем, а само воспоминание – это очевидно наблюдение за сигналами из памяти, мало отличающееся по физической природе от наблюдения за реальными объектами. Мы посылаем запрос в нашу память и наблюдаем пришедшие в ответ сигналы. Какая-то часть нас, которая и является в действительности «нами», когда мы пытаемся ощутить реальность бытия по примеру Декарта, представляет собой наблюдателя сигналов от окружающих ее нейронов. А ощущение «осознания себя», вероятно, возникает в момент прохождения сигналов через эту часть, как через мембрану. Каждую секунду в нашем мозгу совершается невероятное количество неосознанных процессов. Мы можем заметить немногие из них (ощущение толчков от сердцебиения, температуру полости рта), если переведем на них фокус своего внимания. Перемещая фокус внимания в пределах черепной коробки можно ощущать реальность бытия. Попадая в фокус, сигналы записываются в нашу память восприятия.
Возможно, что чувство реальности, чувство времени, обязаны своему существованию тем, что в фокусе внимания одновременно находятся как только что обработанные сигналы от органов чувств, так и некоторый момент непосредственного ближайшего прошлого, чуть более отдаленно прошлого (доли секунды) и часть отдаленных воспоминаний, участвующих в принятии решений. Это позволяет нам ощущать себя целостно в непрерывном потоке времени.
Если на мгновение представить себе, что память исчезла и мы какое-то время наблюдаем мир ничего не запоминая, не вспоминая и не сравнивая ни с чем, это будет равносильно невозможности узнать ни один образ и в целом отсутствию сознания.
Все эти соображения наводят на мысль о том, что если мы будем строить разум роботов по образу и подобию человеческого, наделять их эмоциями (для роста умиления при взгляде на свои создания), полученные машины, по крайне мере первое время, будут совершать человеческие ошибки или очень на них похожие. Если только машины не будут к тому моменту в тысячи раз мощнее человеческого мозга в вычислительном плане, что снижает фактор времени размышления.
Роботы как новая раса
Мне кажется, вопрос «могут ли машины думать?» слишком бессмысленный, чтобы заслуживать обсуждения. Тем не менее, я верю, что к концу века смысл слов и общее образованное мнение изменятся настолько, что станет возможным говорить о машинном мышлении, не ожидая возражений в свою сторону.[31]
Алан Тьюринг, 1950
Если не вдаваться глубоко в спор о слабом и сильном искусственном интеллекте, простой ретроспективный взгляд позволяет надеяться, что метафизика сдаст и этот рубеж, т.е. будет доказана материальность сознания. Во всяком случае, истории не известны примеры, когда теория нематериальности или непознаваемости чего бы то ни было уверенно одержала победу над материальной или познаваемой версией. А это ставит перед нами проблему социальных прав роботов. Например, такие абсурдные по нынешним меркам вопросы, как:
1. Судить ли человека за убийство робота?
2. Вводить ли ограничения на создание копий с роботов?
3. Давать ли роботам избирательные права?
4. Разрешать ли им занимать руководящие должности?
5. Разрешать ли смешанные браки и усыновление?
6. Что-то еще более странное…?
Следуя за Бертраном Расселом[5] и Аланом Тьюрингом, отметим следующие интересные мысли:
Тезис №III. Каждый человек судит о наличии у окружающих такого же сознания, как у себя, только из личного общения.
Т.е. нет никакого «непосредственного контакта». Если мой собеседник вдруг начинает «сбоить», неадекватно реагировать, непрерывно говорить ерунду металлическим голосом и искрить проводкой, сознательность сразу же ставится под сомнение. С другой стороны, как насчет «Человека дождя»[32]?
Эпоха одухотворенных машин
В своей книге «Эпоха одухотворенных машин»[9], пионер интеллектуального машиностроения Рэй Курцвейль предсказывает следующее:
2029 год. Тысячедолларовый компьютер достигает вычислительной мощности в 1000 раз превышающей возможности человеческого мозга. Нейронные шины улучшены до высокоскоростного обмена напрямую с человеческим мозгом. Становится доступным широкий круг нейронных имплантатов, улучшающих визуальное и звуковое восприятие, понимание языка, память и способность принимать решения. Компьютеры прочли и просмотрели все имеющиеся текстовые и мультимедиа-данные, созданные как человечеством, так и сгенерированные другими компьютерами. Все шире обсуждаются такие вопросы, как юридические права компьютеров и что определяет принадлежность к ‘человеческому существу’.
От этого мнения тяжело отмахнуться, т.к. оно принадлежит человеку, создавшему первые в мире программу-поэта, систему распознавания печатных текстов и музыкальный синтезатор. В своих предсказаниях он использует закон Мура[33] для роста вычислительной техники, и приводит следующий график:
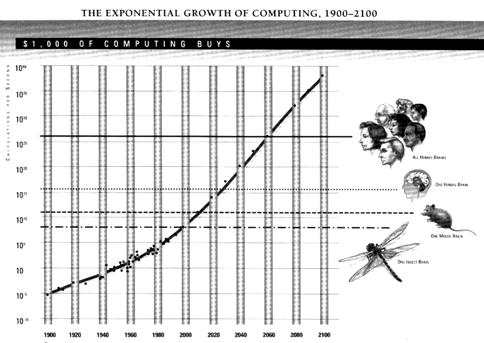
Рис. 7. График роста мощности общедоступных компьютеров за $1000, согласно закону Мура
Согласно этому графику, к 2060 году один компьютер стоимостью $1000 будет превышать по вычислительной мощности все человечество. В настоящий момент даже самые застарелые скептики согласны с тем, что закон Мура представляет собой действительный закон, который не основывается на простом удвоении плотности упаковки транзисторов. Существует более глубокая закономерность, заключающаяся в положительной обратной связи между мощностью вычислительной техники и новым поколением, построенным с ее использованием. Более того, уже сейчас видно, что рост ускоряется. Влияют и законы рынка, вынуждающие производителей искать все новые технологии для обеспечения головокружительного роста.
Вывод Курцвейля таков, что мы неизбежно исчезнем как доминирующий вид, передав эволюционную эстафету более надежным и более интеллектуальным творениям – машинам.
Обеспокоенный таким положением вещей, Билл Джой, ведущий специалист и архитектор программного обеспечения Sun Microsistems и друг Курцвейля, пишет[11]:
Если машинам позволить принимать решения самостоятельно, то мы не можем делать никаких догадок относительно результатов, поскольку невозможно предположить, как такие машины могли бы себя вести… …Конечно, можно утверждать, что люди никогда не будут достаточно глупы, чтобы передать всю власть машинам. Но мы не предполагаем ни того, что человеческая раса добровольно переложит власть на машины, ни того, что те сами умышленно ее захватят. Что мы действительно предполагаем – так это то, что человечество легко может позволить себе дрейфовать к состоянию такой зависимости от машин, что оно не будет иметь никакого практического выбора, но примет все решения машин. Поскольку общество и проблемы, которые стоят перед ним, становятся все более сложными, а машины – все более разумными…
Мнение Джоя - такая ситуация недопустима. Однако, будучи архитектором современного программного обеспечения, он чувствует, как сам себе копает могилу. Следует заметить, что Билл Джой новичок в вопросе социальных последствий развития робототехники. Обычный ответ, который он слышит, таков: «В этом нет ничего нового. Есть целые университеты, которые ежедневно изучают эту проблему, а Ваши заботы и аргументы – уже прошлый век».
Однако, вычислительная мощность, очевидно, еще не означает разумности. Прежде чем мы сможем говорить о равенстве машин и людей, человечество должно создать целую систему теорий, полностью объясняющих феномен человеческого сознания. На данный момент, этот процесс не подгоняется никаким известным законом, хотя прогресс в нем уже сейчас может оказаться даже более значительным, просто никто ничего не подсчитывал.
На сегодняшний день, наиболее известным в широких кругах лидером движения за невозможность создания разумных машин, является известный математик Роджер Пенроуз со своей книгой «Новый ум короля». Камнем преткновения является теорема Геделя о неполноте, под которую должен, по идее, подпадать и человеческий мозг. Пенроуз находит решение в квантовых вычислениях. Если еще раз посмотреть на теорему, можно увидеть, что она постулирует не невозможность, а бесконечное число шагов доказательства. Обнаружив в нейронах крохотные углеродные мини-трубочки, Пенроуз приходит к выводу: именно в них происходят квантовые вычисления, позволяющие за конечное время осуществить бесконечное число шагов доказательства истинности того самого ускользающего истинного утверждения.
Курцвейль приводит три возражения:
1. Это правда, что машины не могут доказать неразрешимые утверждения геделевского типа. Но люди также не могут их решить. Люди могут только диагностировать, что перед ними геделевское утверждение, а это может сделать и компьютер;
2. В любом случае, квантовые вычисления не могут преодолеть ограничения, т.к. способны выполнить очень большое, невероятно большое, но никак не бесконечное число шагов;
3. Даже если доводы 1 и 2 неверны, это не мешает нам использовать квантовые вычисления в компьютерах. Если мозг производит квантовые вычисления, это доказывает только то, что они не противоречат законам физики. Триллионы современных транзисторов используют квантовый эффект – туннельный переход – и нет никаких доводов в пользу того, что мозг обладает эксклюзивными правами на квантовые вычисления.
Далее Пенроуз считает, что момент редукции квантового состояния волновой функции ответственен за сознание - ощущение человеком реальности и собственного «я». Курцвейль отвечает, что думал над этим вопросом 3 года и, хотя все это несколько лишено здравого смысла, не смог найти серьезных аргументов ни в одну пользу.
Есть ли у роботов душа?
После решения вопросов разумности, проблема души будет являться основным философским камнем XXI века. Отложим немного жизнь после смерти и переформулируем вопрос по-другому:
Что в нашем теле является вместилищем души, т.е. источником нашей самоидентификации?
Предположим, что у нас есть возможность целиком заменить все органы ниже шеи на искусственные. Заменить глаза, слуховой аппарат, череп, все мягкие ткани, кроме мозга. Правда ли, что «я» - это определенный орган внутри мозга, или же это комплекс сигналов обширной области мозга? Если мы решим перенести себя на другой носитель, неважно органический или нет, что мы должны будем переносить? Что важно, а что нет?
Попытаемся продвинуться в решении этой проблемы, проделав один мысленный эксперимент. Известные нам законы физики не запрещают создать почти точную копию индивида или его части, например путем магниторезонансного сканирования и последующей сборки нанороботами. При этом оригинал видит окружающий мир, осознает, а что будет с копией? Фактически вопрос ставится так: наше сознание – это материальный продукт мозга или проявление некой сущности, временно живущей в мозгу? Даже зная, что вся память индивидуума и все когнитивные процессы материализованы в мозгу, достаточно ли этого для того, чтобы утверждать – каждый момент сознания, то, что мы ощущаем, прикасаясь к другим предметам, так же полностью принадлежит мозгу и может быть тиражировано?
Кто-то может предполагать наличие в мозгу каких-то не копируемых элементов, таких как носитель уникального глобального кода души или чего-то вроде этого, необходимого для отправки информации из фокуса внимания в другой мир вне «матрицы». Очевидно, теория метафизических существ, наблюдающих материальный мир через фокус внимания мозга, для которых это своего рода развлечение, просто переносит вопрос в другую плоскость.
Если не избегать ответа и не забалтывать его в метафизических представлениях, можно прийти к мысли, что даже если природа осознания себя нематериальна, это не противоречит материальности сознания.
Спасти душу, как она представлена в религии, может только метафизическое хранилище всех знаний души, приобретенных ею за время жизни. Это, вообще говоря, вопрос ненаучный. Опыты хирургического вмешательства в мозг показывают, что органические повреждения вызывают пропадание знаний и навыков. А если теорию невозможно проверить на воспроизводимом опыте, она ненаучна и автоматически побеждает та, которую проверить можно.
Учитывая, что не существует воспроизводимых техник помнить моменты полного беспамятства, вне зависимости от того, есть душа или нет, т.к. память все-таки хранится в мозге, можно считать, что с каждым пробуждением нам приходится заново осознавать себя и свой опыт. К примеру, если моя душа проснется в другом теле, в другом мозгу, со своей памятью об индивидууме, она никак не сможет заметить подлога. Все, к чему она может получить доступ, находится в черепной коробке того другого тела, и там нигде нет компромата.
Т.е. если душа существует и у нее есть носитель, маркер, номер или еще что-то такое, то после смерти человеческого тела его можно будет воссоздать искусственно в другом носителе. А если душа не существует, то все и проще и сложнее, поскольку довольно трудно понять, каким образом в хитросплетении электрических сигналов может зародиться сознание, и только наличие его у нас позволяет с уверенностью сказать, что это возможно.
В этом смысле никак нельзя с полной уверенностью утверждать, что у искусственного создания не может быть собственного сознания, души или чего угодно еще.
Кто такие e-существа?
В российской прессе основной шум по поводу будущего робототехники производят статьи к.т.н. Александра Болонкина, гражданина США. Болонкин придерживается следующей позиции[12]:
Необычайно быстрое развитие компьютерной технологии и особенно микрочипов, позволяющих на одном квадратном сантиметре размещать сотни тысяч электронных элементов, открыло перед человечеством совершенно другой метод решения проблемы бессмертия отдельного индивидуума. Этот путь основан не на сохранении хрупких биологических молекул, а в переходе на искусственные полупроводниковые (силиконовые, галлиевые и т.п.) чипы, устойчивые при больших колебаниях температур, которые не нуждаются в пище, кислороде, сохраняются тысячи лет… …И если бы наш мозг состоял из чипов, а не биологических молекул, то это и означало, что мы получили бессмертие. …Согласно исследованиям автора такой переход в бессмертие (Е-существа) будет возможен уже где-то через 10...20 лет
Выдержки из этой статьи часто появляются и на ТВ. Особенно заманчивой представляется идея путешествия бессмертной электронной души со скоростью света. Переписывая данные программы с одного носителя на Земле на другой, к примеру, на Марсе, мы как бы переносим и саму личность. В общем и целом, статья совершенно неадекватная. Например, она приводит данные о проекте «Маугли» Министерства Обороны США в рамках которого в 1990х был сканирован мозг смертельно больного ребенка, и теперь родители могут общаться со своим растущим электронным сыном, видеть его на мониторе, и даже «как бы качать его на руках», что в настоящий момент совершенно чудовищная ерунда.
Заключение
Кибернетический организм как симбиоз не добавляет ничего нового к уже известным нам отношениям. Очки могут стать контактными линзами, так же как компьютер в неопределенном будущем может стать чем-то внутри черепной коробки. Даже став частью глаза, линза остается инструментом. А все вопросы потери контроля и манипулирования могут быть рассмотрены на примере отношений наркомана и его наркотика. Инициатива всегда исходит от человека, по крайней мере в первый момент.
Ситуация меняется в случае полностью искусственных организмов. До какой-то степени это по-прежнему инструмент, но инструмент в том же положении, как и сельскохозяйственный скот или римские рабы. Разница состоит в том, что у коров практически нет никаких шансов встать у руля, а технологии потенциально способны. Сугубо прагматически, мы можем двигаться по пути роботизации до тех пор, пока это будет выгодно, т.е. очень далеко. Прилагая достаточно много усилий, мы можем последовательно делать робота лучше и лучше среднего человека в любой его деятельности. Человек сам поставит технологии на пьедестал. И тогда уже, если не можешь победить чего-то – стань им.
Тем не менее, история богата сюрпризами и примерами тому, как глубоко можно ошибаться в любых суждениях. И если история не пойдет по пути плавной роботизации самого человека, это будет очень интересно, но не невероятно.
Литература:
[1] Леонид Черняк, Чарльз Бэббидж – изобретатель и... политэконом, Еженедельник "Computerworld", #17, М., "Открытые Системы", 2001.
[2] Винер Норберт, Кибернетика или управление и связь в животном и машине. / Поваров Г.Н.(пер с англ.и предисл.).-2-е изд.-М.:Сов.радио, 1968. -326 стр. - Перевод издания:Cybernetics or control and communication in the animal and the machine. / Wiener Norbert.
[3] Норберт Винер, Моя связь с кибернетикой, ее начала и ее будущее / Norbert Wiener, «My Connection with Cybernetics, Its Origins and Its Future», Cybernetica (Namur), 1958, vol. No 1, pp. 1-14.
[4] Винер Н., Творец и робот, М., Прогресс, 1966, 104 стр.
[5] Бертран Рассел, Человеческое сознание: его сфера и границы, Киев, Ника-центр, 2001 -555 стр. – Перевод издания: Bertran Russel, «Human Knowledge, Its Scope And Limits», George Allen and UNWIN Ltd., London, 1948.
[6] Успенский В. А., Теорема Геделя о неполноте, Theoretical Computer Science #130, 1994, стр. 273-238.
[7] National Transportation Safety Board - Annual Review of Aircraft Accident Data U.S., Air Carrier Operations, Calendar Year 2000, 70 p. with appendixes.
[8] Марвин Минский, Вычисление: конечные и бесконечные автоматы, Прентис-Холл, 1967 / Marvin L. Minsky, Computation: Finite and Infinite Machines, Prentice-Hall, 1967.
[9] Рэй Курцвейль, Эпоха одухотворенных машин, Пингвин Букс, 1999 / Ray Kurzweil, Age of Spiritual Machines, Penguin Books, 1999, 377 p.
[10] Дормашев Ю.Б. и др., Современные методики исследования внимания – спецпрактикум по общей психологии, Лаборатория психологии познавательных процессов кафедры общей психологии факультета психологии МГУ им. М.В. Ломоносова, Москва, 2000.
[11] Билл Джой, Почему будущему мы не нужны, “Wired”, Выпуск 8.04 - апрель 2000 (перевод К. Гордеева) / Bill Joy, Why the future doesn't need us, Wired: Issue 8.04 | Apr 2000.
[12] Александр Болонкин, XXI век – начало бессмертия людей, М., Наука и Техника, июнь 2000.
[13] Мацкевич В.В., Занимательная анатомия роботов, М., "Радио и связь", 1988.
[14] Эйдзи Накано, Введение в робототехнику. [Монография. Перевод с японского А.И.Логинова, А.М.Филатова, под редакцией к.т.н А.М.Филатова. (М.; Мир, 1988).
[1] Известный писатель-фантаст Айзек Азимов (настоящее имя Исаак Озимов, место рождения Украина) считает, что ему принадлежит право изобретателя термина robotics (робототехника), использованного им в рассказе «Runaround» (Отговорки), вышедшем в 1942 году. Термин присутствует в сборнике его рассказов «Сны роботов» (Isaac Asimov, Robot Dreams, Victor Gollancz, London. 1989), объединившем истории, независимо печатавшиеся с 1947 по 1986 год. Не все исследователи согласны с Айзеком Азимовым.
[2] Общепризнанный первоисточник – «Универсальный словарь искусств и наук» (The Chambers Cyclopedia, издатель Эфраим Чамберс, Лондон, издание 1727 года); Неверное словообразование от греческих андро (человек, мужчина) и эйдес (разновидность, похожий), поскольку подразумевает скорее мужчину. Правильный бесполый термин – антропоид, от антропос (человеческое существо). Есть также термин гиноид для роботов-женщин.
[3] Поверим Википедии на этот раз (см. Шпионы в стране Wikipedia)
[4] Роберт Дилтс, статья «Mental Maps, ”Thought Viruses” and Health, part 2», Anchor Point №10.04 от Апреля 1996, стр. 16.
[5] Первоначально Чапек назвал свои создания «лаборами» от латинского слова labor – работа. Но затем по совету брата поменял название на robot от чешского слова robota – тяжелый принудительный труд. В лучших наших традициях, первый перевод пьесы на русский язык вводит свой собственный вариант - «роботарь».
[6] Об этом рассказывается в «Илиаде» Гомера.
[7] Гомункулус – искусственно полученный человек. Вот один рецепт приготовления гомункулуса:
«Возьми известную человеческую жидкость и оставь гнить ее сперва в запечатанной тыкве, потом в лошадином желудке сорок дней, пока не начнет жить, двигаться и копошиться, что легко заметить. То, что получилось, еще нисколько не похоже на человека, оно прозрачно и без тела. Но если потом ежедневно, втайне и осторожно, с благоразумием питать его человеческой кровью и сохранять в продолжение сорока недель в постоянной и равномерной теплоте лошадиного желудка, то произойдет настоящий живой ребенок, имеющий все члены, как дитя, родившееся от женщины, но только весьма маленького роста».
Рецепт, как и сам термин, принадлежит не кому-то там, а Теофрасту Парацельсу.
[8] Журнал «Крелле» (Crelle Journal für die reine Mathematik), статья «Об одном новом общем принципе механики» (Über ein neues allgemeines Grundgesetz der Mechanik), 1829.
[9] Примечательно, что формулу и идею с квадратами Гаусс позаимствовал из собственной же теории ошибок – всем известный метод наименьших квадратов в статистике.
[10] Например, что произойдет с настольной лампой на длинной шарнирной ножке, если на ней подвесить какой-нибудь груз.
[11] Интернет-доска «Основные этапы развития робототехники», журнал «Бизнес Уик».
[12] Параллельные роботы и манипуляторы – одна из самых сложных и интригующих областей современной робототехники, хотя соответствующая теоретическая база относится еще к 1645 году. Согласно определению доктора Жана-Пьера Мерле (Dr. Jean-Pierre Merlet, институт INRIA, Франция), параллельный робот это:
«Замкнутый механизм, в котором кисть манипулятора соединена с базой манипулятора более чем одной независимой кинематической цепью».
Достоинство параллельных манипуляторов в том, что они обладают большей грузоподъемностью и точностью, т.к. нагрузка, как и ошибка, распределяется между всеми звеньями, а не складывается в одном из них.
[13] Проксимальное звено – звено, которое крепится непосредственно к базе.
[14] Дистальные звенья – звенья, соединенные с базой не напрямую, а через проксимальные или другие дистальные звенья.
[15] Пантограф – механическое устройство для копирования чертежей в измененном масштабе.
[16] Космонавты Нил Армстронг и Эдвин Олдрин пробыли на Луне в Море Спокойствия 21 ч 36 мин с 20 по 21 июля 1969.
[17] Согласно Raibert, M. H., Brown, H. B., Jr and Chepponis, M. Experiments in balance with a 3D one-legged hopping machine. International Journal of Robotics Research #3, 1984, pp. 75-92.
[18] Defense Advanced Research Projects Agency – Агентство передовых исследовательских оборонных проектов США.
[19] SDR - Sony Dream Robot - робот мечты от Сони.
[20] В ливре 20 су, в су 12 денье, - десятичная система здесь бессильна.
[21] Кардинал Андре-Геркуль де Флери (1653–1743), с 1726 по 1743 первый министр Луи XV.
[22] Гаспар де Прони , руководитель бюро переписи при французском правительстве Наполеона Бонапарта с 1790 по 1800 гг.
[23] Примерно так: «Слоны не умеют летать»: «Поскольку это и это аксиомы, то из этого следует, что…, а из этого, что …» и так до тех пор, пока не получим в точности «а из этого, что слоны не умеют летать».
[24] Исторически, теорема имеет отношение к формальным системам не слабее арифметики Пеано – самой по себе очень простой и бедной системы, - а все предприятие затевалось для попытки обосновать корректность и полноту всей математики в целом. Задача такого обоснования была поставлена Давидом Гильбертом на II Международном Конгрессе математиков в Париже в 1900 году в ряду 23 кардинальных проблем математики, которые необходимо решить в XX веке. Буквально задача звучала так: «Доказать непротиворечивость аксиом арифметики».
[25] Во множественном числе, т.к., вероятно, будет построен еще не один аналог оригинальной GPS.
[26] В оригинале «God and Golem, Inc.».
[27] Отчет визирован 17 июля 2004 года, поскольку государственная комиссия с выводами не спешит, и все указанные случаи проходят тщательную процедуру расследования.
[28] [англ.] A hen is only an egg's way of making another egg, Samuel Butler.
[29] Т.е. подходит под определение слабого ИИ.
[30] Было бы кощунственным проводить эксперимент по зачатию, вынашиванию и развитию плода глубоко под землей в бункере с 20-метровыми свинцовыми стенами, куда не проникает никакое излучение; так и так для метафизиков 20 метров свинца - что папиросная бумага. Всегда найдется пара-тройка скрытых ото всех, совершенно неизвестных излучений, параллельных измерений или еще чего, и против этого нечего поставить.
[31] [англ.] "The question, “Can machines think?” I believe to be too meaningless to deserve discussion. Nevertheless I believe that at the end of the century the use of words and general, educated opinion will have altered so much that one will be able to speak of machines thinking without expecting to be contradicted.", Alan Turing, 1950.
[32] «Человек Дождя» (Rain Man, 1988) – художественный фильм о человеке, страдающем аутизмом, роль которого исполнил Дастин Хоффман. Прототипом героя послужил реально существующий человек, савант, Ким Пик (Kim Peek, род. 1951), абсолютный гений в 15-ти областях от истории и литературы до арифметики, но совершенный ребенок в остальном, неспособный даже самостоятельно одеться. Ким аутизмом не страдает, у него врожденные повреждения мозга.
[33] В процессе подготовки выступления в 1965 году Гордон Мур (Gordon Moore, главный инженер Intel Corporation) представил в виде графика рост производительности микросхем памяти. Он обнаружил закономерность: новые модели микросхем появлялись с периодом 18-24 месяцев, а ёмкость и скорость их работы каждый раз возрастала примерно вдвое.
